Адаптивное управление разверткой видеокадра. Алгоритм управления
Поскольку априори масштаб долей ПЖ ввиду специфики УЗИ точно установить затруднительно, то при реализации развертки видеокадра (рисунок 3.3) целесообразно использовать принципы адаптивного управления, т.е.
априорных данных недостаточно для точного описания (даже при наличии анкетирования конкретного пациента) деталей переднего плана.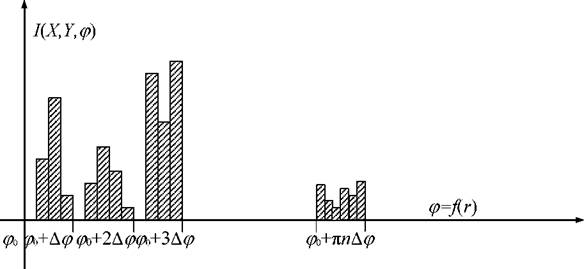
Рисунок 3.3 - Развертка видеокадра (гистограмма) с помощью
спирали Ферми
Используем многошаговый (итеративный процесс управления) и одно из свойств принятой за основу цифрового представления кадра спирали Ферми, а также разности в интенсивности (яркости) объектов переднего плана и шумового фона. В этом случае многошаговый процесс управления может быть представлен следующим образом.
Пусть известно исходное состояние кадра в начале процесса квантования, как - множество состояний, причем
- множество состояний, причем , где С - исходная точ
, где С - исходная точ
ка привязанная к масштабной сетке (рисунок 3.2),

Тогда шаг

или

т.е. - результат преобразования гистограммы цифрового представления кадра (сцены) на k+1-м шаге итеративного процесса. Введем оператор преобразования как Eδза один шаг, тогда

а при весь динамический процесс можно выразить в виде последова
весь динамический процесс можно выразить в виде последова
тельности преобразований. 
Управление на каждом шаге ukможет принимать одно из множества значений - пространство допустимых управлений на k-том шаге итера
- пространство допустимых управлений на k-том шаге итера
ции [61].
Тогда можно преобразование на k-том шаге представить, как

т.е. - в виде разностного уравнения.
Качество управления определяется выбранным критерием, т.е. правилом, которые здесь может быть использовано как отношение правдоподобия [102]:  где N0- спектральная плотность шума для фоновой части сцены; ∖F- верхняя частота изображения; H1- гипотеза о наличии объекта, H0- об отсутствии объекта (т.е. пиксел (x, yj) - решение H1или H0в зависимости от того л больше или меньше порогового уровня ∆ П ).
где N0- спектральная плотность шума для фоновой части сцены; ∖F- верхняя частота изображения; H1- гипотеза о наличии объекта, H0- об отсутствии объекта (т.е. пиксел (x, yj) - решение H1или H0в зависимости от того л больше или меньше порогового уровня ∆ П ).
Реальный алгоритм (рисунок 3.4), использующий приемы наискорейшего спуска, может использовать отношение  где M- выборочное среднее для пикселей, превышающих ∆ П , - к среднему количеству пикселей по яркости ниже порога ∆ п в данном координатном секторе сетки (x, y,φ) на данном k-том шаге управления.
где M- выборочное среднее для пикселей, превышающих ∆ П , - к среднему количеству пикселей по яркости ниже порога ∆ п в данном координатном секторе сетки (x, y,φ) на данном k-том шаге управления.
простаты
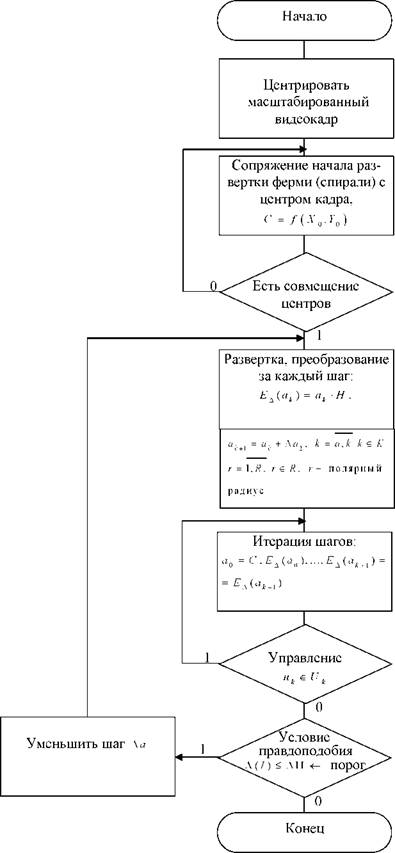
Рисунок 3.4 - Алгоритм управления разверткой видеокадра с изображением
Результаты развертки можно обрабатывать и в статистическом базисе [180, 181], параллельно с преобразованием Фурье как источником дополнительных признаков, расширяющих их словарь.
Еще по теме Адаптивное управление разверткой видеокадра. Алгоритм управления:
- Алгоритм управления системы поддержки принятия решений.
- 3.3 Алгоритм управления процессами принятия решений
- 3.3 Алгоритм управления процессами принятия решений
- 4.1. Алгоритм управления системой поддержки принятия решений
- Блок управления бустингом и алгоритмы его работы
- Примеры алгоритмов функционирования рабочих групп по управлению КМП в подразделениях многопрофильного ЛПУ
- Алгоритм управления процессами принятия решений в интеллектуальной системе оценки риска и профессиональныхзаболеваний водителей транспортных средств экстренных служб
- Ситуационное управление. Виды управления
- 3.6 Разработка системной модели распознавания состояния ПЖ и алгоритма кластеризации переднего плана видеокадра ТАУЗИ и ТРУЗИ
- 3. Управление конфликтом
- Искусство управления
- Законы науки управления
- Принципы управления персоналом
- Управление финансами
- 15.3. Теоретические основы науки управления
- 11.3. Психология в управлении
- Структура управления Системой
- Положение об аппарате управления районного медицинского объединения
- Принципы науки управления
- Субъект управления