Использованное оборудование
Диссертационная работа выполнялась на кафедре урологии МГМСУ им А.И. Евдокимова, расположенной на базе ГКБ 50 города Москвы. В ходе подготовки диссертационной работы для обследования пациентов в разные сроки до и после операции использовалось оборудование, находящееся на балансе МГМСУ и на балансе ГКБ 50 г.
Москвы.Все периоперационные лабораторные анализы выполнялись клинической лабораторией больницы 50. Динамический контроль уровня ПСА сыворотки крови после операции выполнялся пациентами в лабораториях районных поликлиник или медицинских центрах по месту жительства.
Ультразвуковые исследования выполнялись на двух аппаратах B&Q «Falcon» (Дания). В комплект поставки обоих ультразвуковых сканеров входит набор из секторального и линейного датчиков, а также биплановые ректальные датчики с насадками для трансректальной биопсии предстательной железы. Для выполнения биопсии простаты использовались автоматические биопсийные пистолеты Pro-Mag™ I2.5 в комплекте с иглами для выполнения трансректальной биопсии простаты Ultra Biopsy Needles G18. (рисунок 2.13)
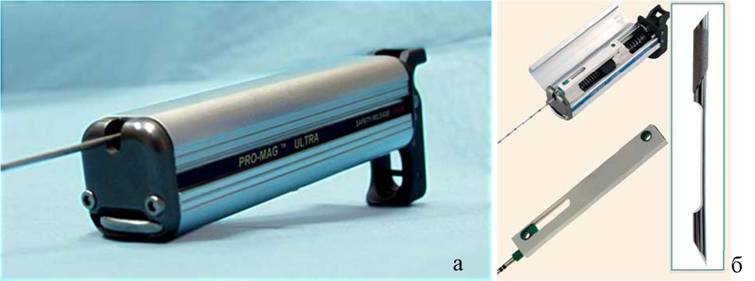
Рисунок 2.13. Автоматический биопсийный пистолет (а) и игла для
выполнения биопсии (б)
Столбик получаемой ткани высотой 19 мм дает достаточный объем ткани для точной диагностики. Игла имеет диаметр 1,2 мм и 20 см в длину. Эхогенный кончик позволяет точно локализовать ее под ультразвуковым контролем.
C ноября 2008 года в клинике урологии МГМСУ функционирует робот-ассистированная хирургическая система «ДаВинчи S» (англ. da Vinci Surgical System), а с сентября 2013 года - хирургическая система «ДаВинчи Si». Все пациенты, результаты лечения которых вошли в данную диссертационную работу, оперированы тремя хирургами, работающими на кафедре урологии МГМСУ. Робот-ассистированные операции выполнялись на обеих хирургических системах ДаВинчи.
Радикальные позадилонные простатэктомии выполнялись в тех же операционных с использованием стандартного набора хирургических инструментов.Роботическая система ДаВинчи (da Vinci) - единственный производящийся серийно робот-ассистированный комплекс,
использующийся для выполнения радикальной простатэктомии.
Система состоит из трех блоков:
1. Консоль хирурга или пульт управления хирурга. В процессе работы хирург в положении сидя располагается за консолью, оснащенной двумя экранами, на которые подается трехмерное изображение операционного поля. Консоль хирурга является панелью управления всей системой и местом работы оператора, осуществляющего управление тремя инструментами-манипуляторами и камерой консоли пациента при помощи двух джойстиков и ножных педалей. (Рисунок 2.14)
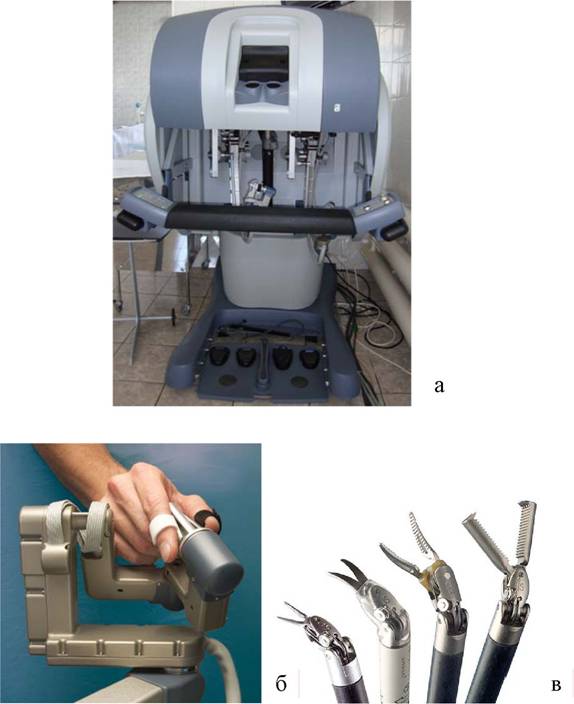
Рисунок 2.14. Внешний вид консоли хирурга роботической системы ДаВинчи (а), джойстика управления (б) и рабочих частей инструментов
EndoWrist (в)
Пальцы хирурга управляют джойстиками - ручками пульта управления, расположенные под дисплеем, которые передают движения рук хирурга инструментам EndoWrist, находящимся внутри пациента, а те в свою очередь воспроизводят их в режиме реального времени. Педали в нижней части консоли позволяют управлять режимом коагуляции - биполярной и монополярной, производят переключения между манипуляторами консоли пациента и управляют работой камеры. Передаваемое изображение является трехмерным, что позволяет хирургу определять объемное положение органов и тканей пациента в пространстве.
2. Консоль пациента оснащена собственным электроприводом. В начале операции она перемещается к операционному столу, несет на себе рабочие манипуляторы и находится в непосредственном контакте с пациентом во время выполнения всего оперативного вмешательства. Три манипулятора с закрепленными на них инструментами, а также один манипулятор с камерой связаны с консолью системы ДаВинчи при помощи компьютерного интерфейса.
(Рисунок 2.15)
Рисунок 2.15. Консоль пациента роботической системы ДаВинчи
Манипуляторы роботической системы обеспечивают точность движений, намного превосходящую возможности человеческой руки. В роботические манипуляторы по просьбе хирурга, находящегося за управляющей консолью, ассистент помещаются различные EndoWrist инструменты, спроектированные специально для системы ДаВинчи. Они обладают семью степенями подвижности, что превосходит в несколько раз возможности любого альтернативного хирургического инструментария. Эти инструменты способны повторить самую мелкую моторику рук хирурга. У каждого инструмента есть своя хирургическая задача. Для РАРП обычно используются два иглодержателя, один зажим с функций биполярной коагуляции, одни изогнутые ножницы с функций монополярной коагуляции и окончатый или острозубый зажим. Всего доступно более 40 типов EndoWrist инструментов. Каждый инструмент может быть использован не более чем на 10 операциях, поскольку содержит электронный чип, ограничивающий возможность его повторного применения. Это же чип обеспечивает распознавание инструмента системой при его инсталляции в манипулятор.
3. Дополнительное оборудование, необходимое для выполнения оперативного пособия располагается на стойке оборудования и включает в себя инсуфлятор Wolf (Германия), коагулятор Erbe (Германия), источник света ДаВинчи, аспиратор и ирригатор Storz Duomat (Германия). Также на стойке расположен дополнительный монитор для ассистента и компоненты оптической системы. (Рисунок 2.16) Хирургический комплекс ДаВинчи оснащён системой Vision System - визуальной системой с высоким разрешением. Объемное изображение, формирующееся системой, дает хирургу точную трёхмерную пространственную картину операционного поля. Эндоскопическая камера ДаВинчи содержит два
оптических канала и два световода.

Рисунок 2.16.
Внешний вид стойки оборудования роботической системыДаВинчи
Для получения реального трехмерного изображения одним из компонентов высокотехнологичной оптической системы является
синхронизатор, обеспечивающий равномерное восприятие изолированных сигналов обоими глазами хирурга. (Рисунок 2.17)
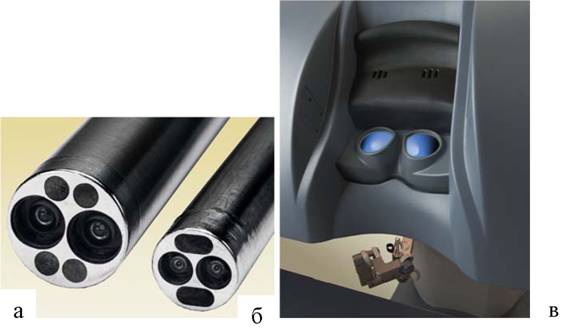
Рисунок 2.17. Внешний вид эновидеокамеры системы DaVinci S (а) и DaVinci Si (б) и окуляров оптической системы Vision System DaVinci (в)
Обработка гистологических материалов и выполнение патоморфологических исследований поводились в лаборатории на кафедре урологии МГМСУ с использованием следующего оборудования:
1. Микроскоп Axioskop 40 2010 Германия
2. Микроскоп Olympus BX 43 2012 Япония
3. Автомат для гистологической обработки ткани Тип Карусель STP 120, Microtom 2005 Германия
4. Микротом-криостат HM 525, Microtom 2005 Германия
5. Система иммуногистохимического окрашивания Autostainer Link 48 с модулем предварительной подготовки препаратов PT Link 2011
6. Программное обеспечение “Морфология 5.5”, Видеотест 2005 2010- обновление программы Санкт-Петербург
7. Видеокамера для микроскопа Jenoptik progress C 10 + 2005 Германия
Еще по теме Использованное оборудование:
- Список использованного оборудования
- 2.3 Амортизационные расходы на использованное оборудование.
- Использованные приборы и инструменты
- 3.4.6. Проблемы использования медицинского оборудования
- Классификации, использованные в работе
- 1.2.2. Использование оборудования в ЛПУ
- 2.4 Лекарственные препараты, использованные в работе
- Оборудование
- Использованная литература.
- Список использованных источников
- Список использованной литературы
- Список использованной литературы