Биомеханические параметры циклических движений корпуса у пациентов с болезнью Паркинсона и эссенциальным тремором
Была предпринята попытка исследовать кинематические особенности трехмерных движений корпуса у пациентов на начальных стадиях БП и у больных с ЭТ (Kurgansky et al., 2014). В работе кроме движения в сагиттальной плоскости рассматривались движения во фронтальной и горизонтальной плоскостях.
Кроме того, помимо голеностопного и тазобедренного сустава исследовалась подвижность грудного сегмента корпуса относительно тазового. Это потребовало создания трехмерной модели движений корпуса, учитывающей все степени свободы, имеющиеся в указанных суставах.В исследовании приняли участие три группы испытуемых. Во-первых, группа пациентов с БП. Стадия БП оценивалась по шкале Хен-Яра (Hoehn, Yahr, 1967) в модификации О. Линдвала (Lindvall et al., 1989). Среди 36 пациентов 27 пациентов имели заболевание в стадии 1, 8 пациентов в стадии 2 и только один пациент в стадии 3. Во- вторых, 14 пациентов с ЭТ. Тремор оценивался с использованием шкалы Фана-Толоса-Мартина (Fahn et al., 1993). Средняя оценка тремора по группе составляла 7,38±0,83. Наконец, в исследовании участвовали 23 практически здоровых испытуемых без известных неврологических и ортопедических отклонений, которых мы рассматривали как контрольную группу (КГ). Исследование проводилось в соответствии с Хельсинкской декларацией при информированном согласии испытуемого.
Экспериментальная установка включала в себя электромагнитную систему регистрации движений и управляющий компьютер. Система регистрации движений Flock of Birds («Ascension Technology Corporation», USA) позволяла измерять пространственное положение датчиков с точностью ±0,5мм и их ориентацию с точностью ±0,1 град. Общая частота оцифровки показаний системы регистрации движения и стабилоанализатора составляла 67 Гц. Четыре датчика движения были закреплены на бедрах, тазе и на грудном отделе спины испытуемого.
Каждому испытуемому предлагалось выполнить шесть двигательных задач в положении стоя.
Исследованию движений в каждой из трех анатомических плоскостей - сагиттальной, фронтальной и горизонтальной - было посвящено по две задачи. В сагиттальной плоскости испытуемые выполняли покачивание всем корпусом вперед-назад за счет сгибания-разгибания голеностопного сустава (задача sA, s - сагиттальная плоскость, A - голеностопный сустав) и наклоны вперед и назад за счет сгибания-разгибания в тазобедренном суставе (задача sH, s - сагиттальная плоскость, H - тазобедренный сустав). Движения, совершаемые во фронтальной плоскости, включали покачивания всем корпусом в стороны за счет подвижности голеностопного сустава (для выполнения этого движения вес тела переносили попеременно с одной стопы на другую - задача fA, f - фронтальная плоскость, A - голеностопный сустав) и наклоны в стороны за счет подвижности тазобедренного сустава вокруг сагиттальной оси (задача fH, f - фронтальная плоскость, H - тазобедренный сустав). Наконец, в горизонтальной плоскости испытуемые выполняли вращение всего корпуса вокруг вертикальной оси тела за счет голеностопного сустава (на самом деле происходило вращение всех сегментов тела в одну сторону вокруг вертикальной оси - задача hA, h - горизонтальная плоскость, A - голеностопный сустав) и вращение таза вокруг вертикальной оси при неподвижных плечах (задача hH, h - горизонтальная плоскость, H - тазовый сегмент).Все испытуемые выполняли шесть предложенных задач в фиксированной последовательности: sA, sH, fA, fH, hA, hH. Каждое движение выполнялось циклически по 5 раз в комфортном темпе, выбранном самим испытуемым. Перед началом эксперимента испытуемому давали устную инструкцию, сопровождаемую показом движений. Испытуемого просили сложить руки на груди, не сгибать колени и не отрывать стопы от платформы. В перерывах между задачами испытуемому напоминали очередную задачу. Момент начала движения выбирался самим испытуемым. Типичный эксперимент продолжался приблизительно 20 мин.
Переход от первичных данных о положении и ориентации датчиков к описанию трехмерного движения корпуса в терминах суставных углов проводился по методу, предложенному в работе (Biryukova et al., 2000).
Далее суставные углы в левом и правом голеностопном и тазобедренном суставах усреднялись. Таким образом, движение в каждом из трех суставов - объединенном голеностопном (A), объединенном тазобедренном (H) суставах и в эквивалентном торсовом псевдосуставе между плечевым и тазовым сегментами (T) - описывалось изменением трех углов: сгибанием относительно поперечной оси, сгибанием относительно сагиттальной оси и вращением вокруг вертикальной оси, всего девять обобщенных координат.Для каждой двигательной задачи были выбраны характерные обобщенные координаты, в наибольшей степени отражавшие специфику данного движения. Так, для наклонов в сагиттальной плоскости анализировался угол поворота вокруг поперечной оси, перпендикулярной сагиттальной плоскости. Для наклонов во фронтальной плоскости был выбран угол вращения вокруг сагиттальной оси. Для вращения корпуса и тазового сегмента относительно вертикальной оси анализировались углы вращения в горизонтальной плоскости. Таким образом, выполнение каждой двигательной задачи характеризовалось тремя переменными - характерными углами в трех модельных суставах. В дальнейшем для обозначения каждого из выходных параметров будет использоваться комбинация из обозначения сустава, за которым в скобках следует обозначение двигательной задачи. Например, обозначение A(sA) используется для обозначения амплитуды угла в голеностопном суставе (А) при выполнении наклонов в сагиттальной плоскости (s) при ведущем голеностопном суставе (sA).
Зависимости выбранных углов от времени имели форму, близкую к синусоидальной. В частотном представлении этому соответствовал изолированный узкий и хорошо различимый пик на частоте основной гармоники. Квазигармонический характер временных зависимостей позволил исследовать их с помощью частотно-фазового Фурье-анализа и получить интегральные характеристики выполнения каждой задачи: частоту, амплитуду и разность фаз для соседних суставов. Частота и амплитуда каждого движения соответствовали положению и величине максимума автоспектра для характерных углов в каждом из трех суставов (от 1 до 3).
Для каждой из задач частоты основной гармоники для всех суставов практически совпадали. В качестве частоты движения принималось среднее значение по трем углам. Разность фаз между движениями в k-ом и m-ом суставах вычислялась как фаза взаимного спектра для изменения характерных суставных углов на частоте основной гармоники.Частота основной гармоники движений. Средние значения частот для каждой из двигательных задач представлены в табл. 2. Оказалось что частота основной гармоники значимо выше у пациентов, чем у испытуемых КГ, причем у пациентов с БП выше, чем у пациентов с ЭТ (см. табл. 2). На первый взгляд, это противоречит отмеченному в литературе наличию брадикинезии у пациентов с БП (Hoehn, Yahr, 1967). Так, у пациентов на поздних стадиях БП при сагиттальном наклоне (вперед или назад) амплитуда движений меньше, а время выполнения движений больше, чем у контрольных испытуемых (Alexandrov et al., 1998). На самом деле здесь нет противоречия. Во-первых, в настоящей работе фаза инициации движения не регистрировалась и ее длительность не учитывалась при оценке времени движения. Между тем, как показано в исследовании инициации ходьбы (Rosin et al., 2009), при БП именно фаза инициации, т.е. время от предъявления императивного сигнала до начала первого шага, оказывается длительнее, чем в норме, а время выполнения шага не отличается от нормы. Во-вторых, в настоящей работе все движения предлагалось выполнять в удобном темпе, в то время как различия в скорости движения у пациентов с БП и у здоровых испытуемых обычно наблюдаются тогда, когда движение предлагалось выполнить как можно быстрее (Alexandrov et al., 1998; Carbon et al., 2007; Rosin et al., 2009). Наконец, брадикинезия проявляется в первую очередь в медленной ходьбе, а частота шагов положительно коррелирует со скоростью перемещения только при условии неизменной длины шага, в то время как у пациентов с БП длина шага укорочена (Morris et al., 2005), частота шагов, напротив, увеличена (Morris et al., 1995).
Исследование походки у пациентов с ЭТ и у пациентов с мозжечковыми нарушениями показало, что как у пациентов с ЭТ, так и у мозжечковых больных су-
Таблица 2
Средние значения частот для двигательных задач
| Группа | Двигательная задача | ||||||
| sA | sH | fA | fH | hA | hH | ||
| ГК | Среднее значение | 0,2035 | 0,2012 | 0,2054 | 0,2325 | 0,2275 | 0,3263 |
| стандартная ошибка | |||||||
| ± 0,01450 | ± 0,01404 | ± 0,01229 | ± 0,01550 | ± 0,01582 | ± 0,03775 | ||
| БП | Среднее значение | 0,2916 | 0,2517 | 0,2814 | 0,2757 | 0,3026 | 0,3623 |
| стандартная ошибка | |||||||
| ± 0,01150 | ± 0,01411 | ± 0,01214 | ± 0,01646 | ± 0,01645 | ± 0,03608 | ||
| ЭТ | Среднее значение | 0,2893 | 0,2600 | 0,2665 | 0,2739 | 0,2646 | 0,3563 |
| стандартная | |||||||
| ± 0,01398 | ± 0,01971 | ± 0,02323 | ± 0,01657 | ± 0,01841 | ± 0,03713 | ||
| ошибка | |||||||
щественно пролонгирована фаза опоры, когда обе ноги соприкасаются с опорой, и укорочена фаза переноса, при сохранении общей длительности шага (Stolze et al., 2001).
В то время как у мозжечковых больных этот эффект выражен и при обычной локомоции, и в тандемном шаге, у пациентов с ЭТ эффект становится заметен только в тандемном шаге. Увеличение частоты циклических наклонов у пациентов, показанное в настоящей работе, также соответствует более кратковременным единичным движениям, где торможение быстрее следует за ускорением. Однако сравнивать с ходьбой наклоны корпуса, выполняемые без отрыва стопы от опоры, можно только с известной осторожностью. Вопрос частоты выполнения произвольных движений у пациентов с БП и ЭТ требует отдельного исследования.Амплитуды суставных углов. Линейный дискриминантный анализ. Рассматривая амплитуды суставных углов как вектор в многомерном пространстве, мы использовали линейный дискриминантный анализ, основанный на методе линейной регрессии (Hastie et al., 2001). Надежность классификации оценивалась при помощи коэффициента $ Коэна (Kohavi, Provost, 1998), который вычисляется при помощи так называемой матрицы ошибок P, каждый элемент которойр.. - это вероятность классификации события категории i как события категории j. Тогда

где - вероятность распознавания классификатором события категории i,
- вероятность распознавания классификатором события категории i,
а pj - вероятность появления события категории j.
При идеальном классификаторе матрица P должна быть диагональной, т.е. ненулевые элементы должны стоять только на главной диагонали. Тогда $ =1. В случае совершенно случайной классификации $ оказывается близкой к нулю.
Мы оценивали точность классификации как функцию числа параметров, включенных в дискриминантный анализ, причем для каждого числа параметров пере-
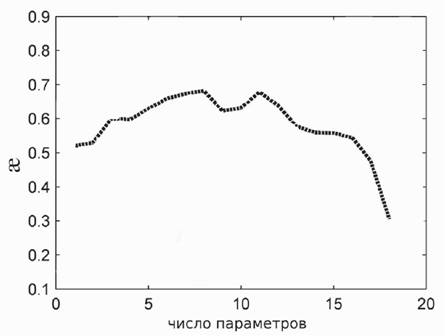
Рис. 1. Оптимальная классификация $ в зависимости от числа параметров
бирались все сочетания амплитуд суставных углов и в качестве искомой точности классификации выбиралось максимальное значение & .
Каждый частный дискриминантный анализ для определенного набора исходных параметров проводился следующим образом: выборку разделяли на обучающую и тестирующую подвыборки в соотношении 0,7 и 0,3 от полной выборки, соответственно. В этом случае показатель & оценивался как среднее, полученное по 200 случайным комбинациям обучающей и тестирующей выборок. Комбинация параметров, соответствующая максимальному значению &, выбиралась в качестве оптимальной для данного числа параметров. На рис. 1 показана кривая оптимальной классификации & в зависимости от числа параметров. Из рисунка видно, что максимальное значение &, равное 0,68 достигается для 8 параметров. Классификация данных на 3 группы является двумерной задачей и выражается двумя скалярными дискриминантными функциями DF1 и DF2, состоящими из 8 наилучших классификаторов - амплитуд изменения суставных углов.
DF1 = -.05H(sA)-.09T(sH)-.04H(sH)+.28A(sH)+.016T(fA)+.03T(hA)+.02H(hH)+. 13A(hH)-1.4
DF2 = -.23H(sA)+.01T(sH)+.02H(sH)-.1A(sH)+.23T(fA)+.02T(hA)+.004H(hH)- .02A(hH)-.9
На рис. 2 показана скаттерграмма участников исследования в координатах дискриминантной функции. Каждый светлый квадрат соответствует испытуемому КГ, темный треугольник - пациенту с БП, а темный кружок - пациенту с ЭТ. Из рисунка видно, что участники демонстрируют тенденцию группироваться в соответствии со своим диагнозом. Пациенты с БП собираются в третьем квадранте (DF1
Еще по теме Биомеханические параметры циклических движений корпуса у пациентов с болезнью Паркинсона и эссенциальным тремором:
- Болезнь Паркинсона и эссенциальный тремор: сходство синдрома при разных прогнозах
- Биомеханические параметры циклических движений корпуса у пациентов с болезнью Паркинсона и эссенциальным тремором