Разработка средств контроля усилия прижатия электродной системы к веку
В ходе первых исследований было выявлено, что при недостаточной силе прижатия электродов к веку зарегистрировать сигнал не представляется возможным. Наличие некоторого минимального давления на веко, видимо, связано
с тем, что необходимо прижать веко к глазному яблоку, вытеснив слезную жидкость из-под места контакта.
Излишнее усилие прижатия приводит к тому, что пережимаются сосуды, а, следовательно, изменяется кровоток и достоверность получаемых сигналов может быть поставлена под сомнение. Помимо этого, излишнее давление на глаз усиливает дискомфорт обследуемого.
Вышеописанные особенности показывают необходимость разработки средств контроля усилия прижатия ЭС к веку. Это может быть как отдельная, так и встроенная в ЭС схема регистрации усилия прижатия электродной системы к веку. Для этого был проведен обзор возможных вариантов реализации поставленной подзадачи.
Усилие прижатия можно регистрировать с помощью резистивных датчиков или на основе пьезоэффекта. При использовании пьезоэлектрических датчиков макетировались конструкции как встроенные в ЭС, так и внешние.
Изготовление пьезодатчиков собственной конструкции затруднительно, т.к. серийно выпускаемых образцов диаметром менее 5 мм с необходимым вектором поляризации среди найденных производителей обнаружить не удалось. Готовое исполнение предоставляется фирмой Honeywell, поршневой датчик FSG15N1A в небольшом корпусе с габаритами 12,7x10,3x8. Заявленная погрешность составляет 0,5%. Макетирование показало, что его встраивание в ЭС нецелесообразно, т.к. необходимо размещение датчика на отдельном электроде, передающим прижимное воздействие (см. Рисунок 3.8).
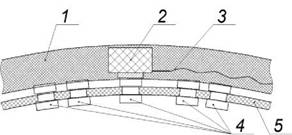
Рисунок 3.8 - Расположение поршневого датчика усилия прижатия: 1 - подложка;
2- датчик; 3- отводящие провода;4- электроды; 5- основание
Это приводит к тому, что усилие, оказываемое "шлейфом" от трикотажного шлема, будет давить на глаз посредством этого датчика, и не будет оказывать прижимного действия на целевые электроды.
Аналогичный эффект наблюдается при размещении датчика на других электродах. Т.е. пропадает равномерность прижатия всех электродов к веку. Увеличение толщины подложки приведет к усложнению процедуры наложения электродов и контроля их местоположения.В ходе настоящей работы рассмотрена возможность расположения датчика FSG15N1A не в электродной системе, а рядом. Возможные точки наложения приведены на Рисунок 3.9.
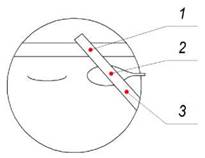
Рисунок 3.9 - Возможные варианты расположения внешнего датчика усилия прижатия: 1- на лбу; 2- на глазу; 3- на скуле
Поскольку поршень имеет меньший диаметр по сравнению с корпусом, на котором он располагается, то непосредственно перпендикулярно поверхности наложить датчик не представляется возможным.
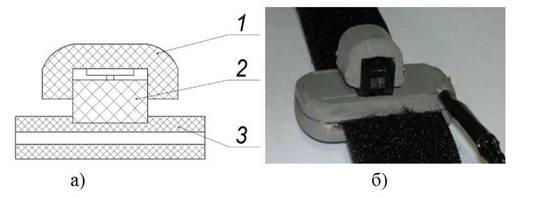
Поэтому была изготовлена специальная накладка (см. Рисунок 3.10), закрепленная штифтами за технологические отверстия на датчике таким образом, чтобы независимо от угла прикладывания основное усилие передавалось именно на поршень датчика, а не на его корпус.
Датчик был установлен на специальном основании, которое крепилось на «шлейфе» трикотажного шлема. Конструкция разработана таким образом, чтобы её легко можно было перемещать вдоль «шлейфа» трикотажного шлема.
Рисунок 3.10 - Конструкция внешнего датчика усилия прижатия с использованием поршневого датчика FSG15N1A (1-накладка, 2- датчик, 3- основание): а) эскиз; б) вид реализованного макета
Проведенные испытания показали, что конструкция удобна в эксплуатации и позволяет зарегистрировать усилие прижатия в любой точке вдоль линии наложения прижимающей резинки трикотажного шлема, но датчик имеет излишнюю чувствительность к способам наложения, поэтому от дальнейшего развития этого конструктивного решения датчика усилия прижатия отказались.
В работе было проведено макетирование конструктивных решений на основе резистивных мембран. Из доступных датчиков были найдены датчики фирм Interlink Electronics и Parallax Inc.
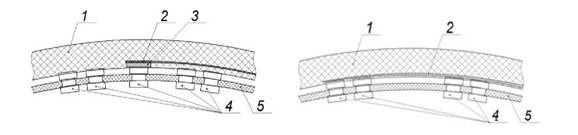
Характеристики датчиков приведены в приложении 4. Одни датчики могут представлять собой диски различного диаметра (FSR 400 и FLEXIFORCE). Для их использования необходимо изготовление дополнительных элементов (см. Рисунок 3.11, а). Другие представляют собой резистивные ленты (датчики SEN-10264 и FSR 408), такие можно устанавливать вдоль всех электродов (см. Рисунок 3.11, б).Датчики, реализованные по резистивной технологии, имеют ряд недостатков: -логарифмическая зависимость между прикладываемым усилием и изменением сопротивления;
- возможные эффекты гистерезиса;
- низкая воспроизводимость (стабильность) регистрируемых сигналов, а также возможная зависимость показаний от окружающей температуры.
а) б)
Рисунок 3.11 - Схемы расположения резистивных датчиков:
1 - подложка; 2- датчик; 3- переходная шайба; 4- электроды;
5- основание; а) датчик в виде диска; б) датчик в виде ленты
Однако они обладают малыми габаритами, а высокая точность не требуется, т.к. получение абсолютного значения усилия прижатия связано с методическими погрешностями измерения применительно к реоофтальмографии.
Макетирование на основе датчиков FLEXIFORCE, SEN-10264 и FSR 408, показало, что ввиду своих габаритов они лишают ЭС гибкости и исключают равномерность прижатия электродов к глазу.
Датчик FSR 400можно установить на каждый из электродов, это позволит контролировать усилие прижатия непосредственно каждого электрода. Предложенный способ повышает достоверность получаемых значений об усилии прижатия, появляется возможность контролировать контакт каждого из электродов, но это усложняет конструктивное исполнение.
Как правило, при схемотехнической реализации датчиков на основе элементов с переменным сопротивлением используют различные варианты моста Уинстона (см. Рисунок 3.12 а, б) или другие [11]. Основываясь на условиях баланса во всех этих схемах используются резисторы того же или близкого порядка, что и верхний предел чувствительных элементов.
Датчик FSR 400 обладает верхним пределом в 100 кОм, и реальные значения сопротивления составляют десятки кОм.Применение мостовых схем с питанием от источника постоянного напряжения более распространено, но они вносят дополнительные погрешности линейности. К тому же удаленное расположение чувствительного элемента
приводит к падению точности преобразования. От этих проблем частично можно избавиться, применив те же схемы, но с источником питания постоянного тока, но в этом случае для регистрации сигнала от двух датчиков необходимо организовывать два независимых источника тока. Такая реализация предполагает большую методологическую погрешность.
Наиболее предпочтительным является применение схемы, устраняющей нелинейность приращения выходного напряжения от приращения резистивного датчика. Схема на основе операционного усилителя (см. Рисунок 3.12, в) не только успешно с этой задачей справляется, но и выходной сигнал не содержит синфазной
составляющей.
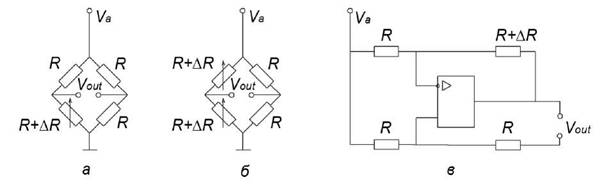
Рисунок 3.12 - Возможные варианты подключения чувствительных элементов:
а), б) - мостовые схемы; в) схема на основе операционного усилителя
Выходное напряжение для схемы определяется выражением:
сопротивление резистивного датчика.
Сопротивление вспомогательных резисторов выбрано равным верхнему пределу сопротивления датчика. Таким образом, при напряжении питания 5В, динамический диапазон составит от 0 В до 2,5В, что удобно для последующей передачи и дискретизации.
В работе применялась схема регистрации на основе ОУ, внутрь подушечки электродной системы на потенциальный электрод был установлен датчик FSR 400.

Для экранирования от внешних помех и помех от реографа был применен стандартный кабель Ethernet Cat.7, стандарт которого предполагает экранирование каждой витой пары отдельно.
Проведенные испытания показали высокую помехозащищенность как от реографа, так и от взаимного влияния датчиков усилия прижатия.Одним из наиболее существенных недостатков реализации обоих типов датчиков является то, что изменения проходят не на жесткой поверхности, а на мягкой. Более того, мягкими являются как само веко, так и поролоновая подложка. Подобная конструкция позволяет только оценить силу прижатия. Поэтому проведение калибровки и балансировки реализованных конструкций является затруднительным, в ходе предварительных испытаний они не проводились.
Результаты испытаний реализованного макета выявили корреляцию между базовым импедансом, регистрируемым реографом, и показаниями, получаемыми на выходном каскаде измерительной схемы. Результаты приведены в относительных единицах (см. Рисунок 3.13).
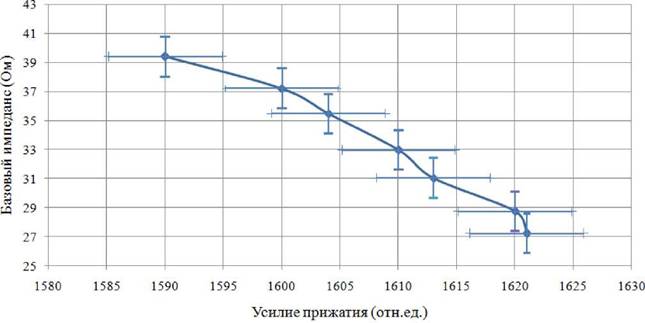
Рисунок 3.13 - Испытания датчика усилия прижатия
Ввиду вышесказанного, для упрощения конструкции есть возможность контролировать усилие прижатия по величине базового импеданса, который должен составлять 34±3 Ом. Указанное значение получено эмпирическим путем для здоровых добровольцев. Для проведения исследований на группах пациентов изготавливались ЭС без датчика усилия прижатия.
Таким образом, по результатам проведенного макетирования и испытаний образцов была разработана как электродная система, так и система её крепления на пациенте (см. Рисунок 3.14).
В работе уделялось внимание не только разработке системы отведения, но и программно-алгоритмическому обеспечению, которое позволяет в автоматизированном режиме обрабатывать регистрируемые
реоофтальмографические сигналы.

Рисунок 3.14 - Разработанная ЭС и система крепления
3.4.
Еще по теме Разработка средств контроля усилия прижатия электродной системы к веку:
- Разработка электродной системы
- Разработка конструкции электродной системы
- Разработка конструктивного решения электродной системы для проведения реоофтальмографических исследований
- 1.5. Система контроля качества лекарственных средств.
- 2.2. Обоснование требований и разработка предложений по техническому облику и структуре принципиально нового средства автоматизированного оперативного экологического контроля - СПК. Базовый состав СПК.
- Глава 3. Разработка и реализация аппаратных, методических и программных средств для биотехнической системы ТП РОГ
- Определение оптимальной геометрии электродной системы
- 1.6. Организация контроля качества лекарственных средств.
- 2.3.2. Система контроля радиационной обстановки.
- 5.2.Средства и методы химической разведки и контроля
- 5.3.Средства и методы радиационной разведки и контроля
- Разработка структуры интеллектуальной системы поддержки принятия решений
- 2.3. Средства измерения и контроля судовых природоохранных комплексов.
- 5.2 Усилия и их результат
- Системи організації контролю за туберкульозом
- Контроль реализации решений и деятельности системы
- Перспективы разработки превентивного лечения болезни Паркинсона на основе мобилизации системы молекулярных шаперонов