Принцип формирования информативного сигнала из зоны трения трибосопряжения, состоящего из сферических тел, на примере эндопротеза
Взаимодействие компонентов эндопротеза представляет собой процесс изнашивания трущихся поверхностей головки и чашки имплантата, который со временем может привести к образованию локальных дефектов, микро- и макроотклонений формы, а также к возникновению виброударов, увеличивая тем самым износ трибосопряжения [17, 24, 42, 72].
При применении электрорезистивного метода неразрушающий контроль зоны трения эндопротеза осуществляется с помощью флуктуирующего электрического сопротивления контакта поверхностей трибосопряжения. Так как контроль зоны трения происходит в динамическом режиме, то электрическое сопротивление при испытаниях будет флуктуировать, и тем самым его анализ целесообразно проводить, рассматривая измерительный сигнал в виде функции от времени Rt).Измерительный сигнал Rt),как отмечалось в гл. 2, содержит информацию об изменении контактной площади трибосопряжения, на формирование которой влияют различные внешние и внутренние факторы (значение и тип нагрузки, качество изготавливаемых поверхностей компонентов и т.д.). Так как естественный процесс движения сустава долговременный (подраздел 1.1.3), то неразрушающий контроль целесообразно проводить при форсированных
испытаниях, где частота вращения одного из компонентов эндопротеза может быть существенно выше реальных условий. Таким образом, для получения измерительной информации из зоны трения может осуществляться упрощенным методом, рассмотренным ниже.
На рисунке 3.1 представлена структурная схема получения сигнала из зоны трения компонентов эндопротеза.
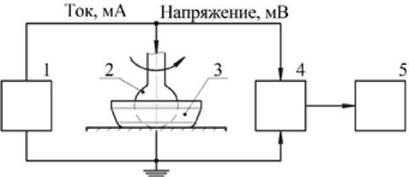
1 - источник тока; 2 - головка эндопротеза; 3 - чашка эндопротеза;
4 - усилитель; 5 - плата сбора данных
Рисунок 3.1 - Принцип измерения фрикционного электрического сопротивления
Согласно рисунку 3.1 источник тока 1 воздействует диагностическим током на трибосопряжение, образованное головкой 2 и чашкой 3.
Флуктуирующее сопротивление в месте сопряжения компонентов приводит к падению напряжения, амплитуду которого увеличивает усилитель 4 и регистрирует плата сбора данных 5.Для возможности контроля возникновения локальных дефектов, виброударов, микро- и макротклонений форм, рассмотренный метод должен быть дополнен техническими устройствами, позволяющими:
- испытывать эндопротез в условиях, приближенных к реальным;
- контролировать силу, действующую на эндопротез, при испытаниях;
- задавать движение одного компонента относительно другого, тем самым моделировать условия изнашивания имплантата;
- регистрировать параметры угла поворота для контроля изменения контактной площади трибосопряжения, как следствие, фрикционного
сопротивления и падения напряжения при полном обороте одного из компонентов. Ввиду вышеуказанного и задач, описанных в разделе 3.1, структурная схема разрабатываемого метода диагностирования эндопротеза примет следующий вид (рисунок 3.2) [68].
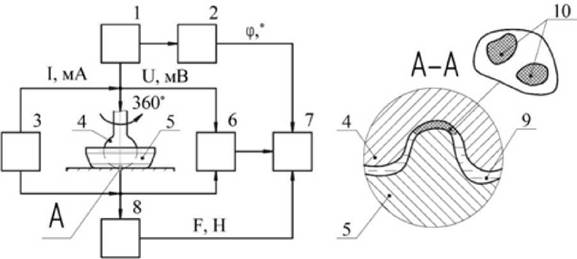
1 - двигатель; 2 - датчик угла поворота; 3 - источник тока; 4 - головка;
5 - чашка; 6 - электрический канал измерения; 7 - плата сбора данных;
8 - датчик силы; 9 - смазочный слой; 10 - пятна контакта
Рисунок 3.2 - Структурно-функциональная схема установки диагностирования
В соответствии с рисунком 3.2 двигатель 1 вращает головку эндопротеза 4, причем каждая смена положения головки 4 регистрируется датчиком угла поворота 2. Одновременно с источника тока 1 подается диагностический ток на трибосопряжение, образованное головкой 4 и чашкой 5 эндопротеза. Вследствие флуктуирования электрического сопротивления за счет изменения смазочного слоя 9 и суммарной площади контактных пятен 10 при взаимодействии поверхностей электрический канал измерения, состоящий из усилителей и фильтра нижних частот, 6 увеличивает амплитуду падения напряжения для дальнейшей его обработки. Контроль за действующей силой на эндопротез и характером нагрузки происходит за счет датчика силы 8. В конце испытания измеренные, синхронизированные между собой параметры с датчика угла поворота 2, электрического канала измерения 6, датчика силы 8 регистрируются платой сбора
данных 7 для последующей обработки (передачи, вычисления, интерпретации полученных значений и отображения выводов).
Еще по теме Принцип формирования информативного сигнала из зоны трения трибосопряжения, состоящего из сферических тел, на примере эндопротеза:
- Содержание
- Принцип формирования информативного сигнала из зоны трения трибосопряжения, состоящего из сферических тел, на примере эндопротеза
- Описание испытательного оборудования